Alle categorieën
-
Geïntegreerde schakelingen (IC's)
Geïntegreerde schakelingen (IC's)
- Interface - sensor, capacitieve aanraking(642)
- Gespecialiseerde IC's(12302)
- PMIC - Spanningsregelaars - Speciaal doel(5644)
- PMIC - Spanningsregelaars - Lineaire regulatiebestrijdingscontrollers(793)
- PMIC - Spanningsregelaars - Lineair + Schakelen(1829)
- PMIC - Spanningsregelaars - Lineair(70981)
- PMIC - Spanningsregelaars - DC DC -schakelregelaars(39569)
- PMIC - Spanningsregelaars - DC DC -schakelregelaars(13507)
- PMIC - Spanningsreferentie(9453)
- PMIC - V / F en F / V omzetters(145)
- PMIC - Thermal Management(592)
- PMIC - Supervisors(47946)
- PMIC - RMS naar DC converters(170)
- PMIC - Voeding Controllers, Monitoren(2104)
- PMIC - Power Over Ethernet (PoE) Controllers(1008)
- PMIC - Power Management - Gespecialiseerd(7722)
- PMIC - Power Distribution Switches, Load Drivers(7706)
- PMIC - PFC (Power Factor Correction)(1222)
- PMIC - OF Controllers, Ideale Diodes(705)
- PMIC - Motor Drivers, Controllers(4712)
- PMIC - Verlichting, Ballast Controllers(560)
- PMIC - LED-stuurprogramma's(7282)
- PMIC - Laser Drivers(573)
- PMIC - Hot Swap Controllers(2816)
- PMIC - Gate Drivers(7083)
- PMIC - Full, Half-Bridge Drivers(1342)
- PMIC - Energiemetering(654)
- PMIC - Display drivers(1435)
- PMIC - Huidige Regeling / Management(1481)
- PMIC - Batterijbeheer(5553)
- PMIC - Batterijladers(3831)
- PMIC - AC DC Converters, Offline Switchers(4905)
- Geheugen - Controllers(358)
- Geheugen - Configuratie Proms voor FPGA's(639)
- Geheugen - Batterijen(13)
- Geheugen(65694)
- Logica - Universele Busfuncties(706)
- Logica - Vertalers, Level Shifters(2854)
- Logica - Special Logic(1870)
- Logica - Signaalschakelaars, multiplexers, decoders(9420)
- Logic - Shift Registers(2665)
- Logica - Parity Generators en Checkers(335)
- Logica - Multivibrators(831)
- Logica - Latches(3658)
- Logica - poorten en omvormers - multifunctioneel, configureerbaar(1687)
- Logica - Poorten en inverters(16453)
- Logica - Flipflops(7780)
- Logica - FIFOs Geheugen(4240)
- Logica - Tellers, Dividers(3456)
- Logica - Comparatoren(592)
- Logica - Buffers, stuurprogramma's, ontvangers, zendontvangers(17835)
- Lineair - Videoverwerking(2909)
- Lineair - Vergelijkers(5084)
- Lineaire - Analoge Multipliers, Dividers(263)
- Lineair - versterkers - Video -versterkers en modules(1905)
- Lineair - Versterkers - Speciaal Doel(1856)
- Lineair - versterkers - Instrumentatie, OP -versterkers, bufferversterkers(34236)
- Lineair - Versterkers - Audio(4567)
- Interface - Spraakopname en weergave(556)
- Interface - UARTS (Universal Asynchrone Receiver Zender)(1237)
- Interface - Telecom(4467)
- Interface - Gespecialiseerd(4833)
- Interface - Signal Terminators(333)
- Interface - Signal Buffers, Repeaters, Splitters(1449)
- Interface - Serializers, Deserializers(1480)
- Interface - Sensor en Detector Interfaces(1524)
- Interface - Modules(169)
- Interface - Modems - IC's en Modules(407)
- Interface - I / O-uitbreidingen(1136)
- Interface - Filters - Actief(1226)
- Interface - Encoders, Decoders, Converters(714)
- Interface - Drivers, Receivers, Transceivers(20755)
- Interface - Direct Digital Synthesis (DDS)(117)
- Interface - Controllers(3628)
- Interface - CODECs(1676)
- Interface - analoge schakelaars, multiplexers, demultiplexers(12567)
- Interface - Analoge schakelaars - Speciaal doel(2533)
- Embedded - System On Chip (SoC)(4496)
- Embedded - PLDs (Programmeerbare Logic Device)(971)
- Embedded - Microprocessors(10083)
- Embedded - MicroControllers - Toepassingsspecifiek(2275)
- Embedded - Microcontrollers(99285)
- Embedded - Microcontroller, Microprocessor, FPGA -modules(1527)
- Embedded - FPGAS (veldprogrammeerbare poortarray) met microcontrollers(81)
- Embedded - FPGAs (Field Programmable Gate Array)(27747)
- Embedded - DSP (Digital Signal Processors)(4081)
- Embedded - CPLD's (complexe programmeerbare logische apparaten)(5187)
- Data Acquisition - Touch Screen Controllers(1210)
- Data Acquisition - Digital to Analog Converters (DAC)(14419)
- Gegevensverzameling - Digitale Potentiometers(6250)
- Data Acquisition - Analog naar digitale converters (ADC)(17776)
- Data Acquisition - Analoog Front End (AFE)(787)
- Data Acquisition - ADCS/DACS - Speciaal doel(3043)
- Klok / Timing - Real Time Clocks(2446)
- Klok/timing - programmeerbare timers en oscillators(23469)
- Klok / Timing - IC Batterijen(4)
- Klok / Timing - Delay Lines(1049)
- Klok/timing - klokgeneratoren, PLLS, frequentiesynthesizers(32775)
- Klok / Timing - Klokbuffers, Drivers(4568)
- Klok / Timing - Applicatie Specifiek(8652)
- Audio Speciaal Doel(1564)
Relevante fabrikant







-
Discrete Semiconductor Products
Discrete Semiconductor Products
- Huidige regulering - diodes, transistors(1090)
- Transistors - Speciaal Doel(226)
- Transistors - Programmeerbare Unijunction(48)
- Transistors - JFETs(1558)
- Transistors - IGBTs - Single(4799)
- Transistors - IGBTs - Modules(63420)
- Transistors - IGBTs - Arrays(26)
- Transistors - FETs, MOSFETs - Single(48330)
- Transistors - FETs, MOSFETs - RF(4903)
- Transistors - FETs, MOSFETs - Arrays(6641)
- Transistors - Bipolair (BJT) - Single, Pre-Biased(4539)
- Transistors - Bipolair (BJT) - Single(25800)
- Transistors - Bipolair (BJT) - RF(2087)
- Transistors - Bipolair (BJT) - Arrays, Pre-Biased(2115)
- Transistors - Bipolair (BJT) - Arrays(2310)
- Thyristors - TRIACs(4044)
- Thyristors - SCRs - Modules(3967)
- Thyristors - SCRs(5436)
- Thyristors - DIACs, SIDACs(319)
- Power Driver Modules(1627)
- Diodes - Zener - Single(87483)
- Diodes - Zener - Arrays(2619)
- Diodes - variabele capaciteit (varicaps, variactoren)(1200)
- Diodes - RF(2753)
- Diodes - Rectifiers - Single(67528)
- Diodes - Rectifiers - Arrays(20581)
- Diodes - Bridge rectifiers(11700)
Relevante fabrikant




-
RF / IF en RFID
RF / IF en RFID
- SAMS -kaarten (Subscriber Identification Module (SIM)(77)
- RF -circulators en isolators(1742)
- RFID, RF Access, Monitoring ICs(1550)
- RFID Transponders, Tags(747)
- RFID Reader Modules(464)
- RFID -evaluatie- en ontwikkelingskits, boards(30)
- RFID-antennes(329)
- RFI en EMI - Afscherming en absorberende materialen(6444)
- RFI en EMI - Contacten, Fingerstock en Gaskets(7497)
- RF-zenders(668)
- RF Transceiver Modules(6900)
- RF Transceiver ICs(4169)
- RF schakelaars(9276)
- RF schilden(16401)
- RF-ontvanger(1998)
- RF -ontvanger, zender en transceiver voltooide eenheden(2763)
- RF Power Dividers / Splitters(1223)
- RF Power Controller IC's(86)
- RF-modulatoren(710)
- RF Mixers(2800)
- RF Andere IC's en Modules(3276)
- RF Front End (LNA + PA)(419)
- RF -evaluatie- en ontwikkelingskits, boards(747)
- RF Richtingkoppeling(2718)
- RF Diplexers(1464)
- RF-detectors(412)
- RF Demodulators(249)
- RF-antennes(12319)
- RF versterkers(19651)
- balun(1496)
- Attenuators(4852)
Relevante fabrikant







-
Optoelectronics
Optoelectronics
- Optomechanisch(480)
- Verlichtingsarmaturen(125)
- Laserdioden, lasermodules - laserafgifte, laservibs(345)
- Hene lasersystemen(31)
- Hene laserhoofden(27)
- Achtergrondverlichting weergeven(93)
- Xenon Lighting(387)
- Touch Screen Overlays(453)
- Paneel Indicatoren, Pilot Lights(75729)
- Optica - Remote Phosphor Light Source(269)
- Optica - Reflectors(665)
- Optica - Lichtpijpen(5384)
- Optica - lenzen(4951)
- LED's - Spacers, Standoffs(2718)
- LED's - Lampvervangingen(29718)
- LED's - Circuitboardindicatoren, arrays, lichtstaven, staafgrafieken(9083)
- LED Thermische Producten(667)
- LED verlichtingskits(64)
- LED verlichting - Wit(37580)
- LED verlichting - Kleur(4728)
- LED verlichting - COB's, motoren, modules(28735)
- LED Indicatie - Discreet(27601)
- Laserdiodes, modules(1553)
- Lampen - Incandescents, Neons(311004)
- Lampen - Cold Cathode Fluorescent (CCFL) & amp;UV(164)
- omvormers(7728)
- Infrarood, UV, Zichtbare Emitters(3871)
- Fiber Optics - Zenders - Drive Circuits Integrated(4085)
- Fiber Optics - Transmitters - Discrete(350)
- Fiber Optics - Transceiver Modules(18758)
- Fiber Optics - Switches, Multiplexers, Demultiplexers(1387)
- Fiber Optics - Ontvangers(695)
- Fiber Optics - Attenuators(654)
- Electroluminescent(102)
- Display, Monitor - Interface Controller(98)
- Display Modules - Vacuüm Fluorescerende (VFD)(249)
- Display Modules - LED Dot Matrix en Cluster(865)
- Display Modules - LED Karakter en Numeriek(5421)
- Display Modules - LCD, OLED, Grafisch(4654)
- Display Modules - LCD, OLED Karakter en Numeriek(2202)
- Display Bezels, lenzen(88)
- Adresseerbaar, Specialiteit(458)
Relevante fabrikant







-
Sensoren, Transducers
Sensoren, Transducers
- Ultrasone ontvangers, zenders - industrieel(115)
- Temperatuursensoren - Thermostaten - Mechanisch - industrieel(3103)
- Temperatuursensoren - analoge en digitale output - industrieel(209)
- Nabijheidssensoren - Industrieel(13611)
- Druksensoren, transducers - industrieel(26503)
- Optische sensoren - Fotonica - Tellers, detectoren, SPCM (enkele foton telmodule)(751)
- Optische sensoren - cameramodules(875)
- Magnetische sensoren - positie, nabijheid, snelheid (modules) - industrieel(554)
- Force Sensors - Industrieel(346)
- Flowsensoren - Industrieel(151)
- Float, niveau sensoren - industrieel(310)
- Encoders - industrieel(4980)
- Kleursensoren - Industrieel(50)
- Aanraaksensoren(100)
- Ultrasone Ontvangers, Zenders(2421)
- Temperatuursensoren - Thermostaten - Solid State(1096)
- Temperatuursensoren - Thermostaten - Mechanisch(3397)
- Temperatuursensoren - thermokoppels, temperatuurprobes(1921)
- Temperatuursensoren - RTD (weerstandstemperatuurdetector)(1525)
- Temperatuursensoren - PTC Thermistors(2273)
- Temperatuursensoren - NTC Thermistors(13259)
- Temperatuursensoren - Analoge en digitale uitgang(3928)
- Strain Gauges(1399)
- Gespecialiseerde Sensoren(1861)
- Zonnepanelen(503)
- Schok sensoren(84)
- Sensor Interface - Junction Blocks(2519)
- Sensorkabel - Assemblies(22011)
- Nabijheid/bezettingssensoren - afgewerkte eenheden(725)
- Nabijheidssensoren(2860)
- Druk sensoren, Transducers(11317)
- Positiesensoren - Hoek, Lineaire Positiemeting(6022)
- Optische sensoren - Reflecterend - Logica -uitgang(194)
- Optische sensoren - Reflecterende - analoge uitgang(432)
- Optische sensoren - fototransistors(1027)
- Optische sensoren - foto -interrupters - slottype - transistoruitgang(1427)
- Optische sensoren - foto -interrupters - slottype - Logica -uitvoer(1215)
- Optische sensoren - Photoelectric, Industrial(16763)
- Optische sensoren - fotodiodes(1543)
- Optische sensoren - fotodetectoren - externe ontvanger(2605)
- Optische sensoren - Foto Detectors - Logic Output(146)
- Optische sensoren - Foto Detectors - CdS Cells(74)
- Optische sensoren - Afstandsmeting(377)
- Optische sensoren - omgevingslicht, IR, UV -sensoren(1305)
- multifunctioneel(558)
- Bewegingssensoren - Trillingen(337)
- Motion Sensors - Tilt Switches(67)
- Bewegingssensoren - Optisch(719)
- Bewegingssensoren - Inclinometers(175)
- Bewegingssensoren - IMU's (traagheidsmeeteenheden)(416)
- Bewegingssensoren - Gyroscopen(214)
- Bewegingssensoren - Accelerometers(1911)
- Magneten - Gekoppelde Sensor(119)
- Magneten - Multifunctioneel(1965)
- Magnetische sensoren - Schakelaars (Solid State)(3700)
- Magnetische sensoren - positie, nabijheid, snelheid (modules)(5199)
- Magnetische sensoren - Lineair, Kompas (IC's)(1247)
- Magnetische sensoren - kompas, magnetisch veld (modules)(35)
- LVDT -transducers (lineaire variabele differentiaaltransformator)(204)
- IrDA Transceiver Modules(196)
- Beeldsensoren, Camera(2235)
- Vochtigheid, vochtensensoren(1425)
- Gas sensoren(1217)
- Force Sensors(188)
- Stroomsensoren(550)
- Float, Level Sensors(1343)
- encoders(6357)
- Stofsensoren(43)
- Huidige transducers(3455)
- Kleur sensoren(85)
- Versterkers(1905)
Relevante fabrikant







-
Connectors, Interconnects
Connectors, Interconnects
- USB, DVI, HDMI -connectoren(446)
- Solid State Lighting Connectors(555)
- Sockets voor ICS, transistors(953)
- Pluggable connectoren(1221)
- Fotovoltaïsche (zonnepaneel) connectoren(136)
- Vezeloptische connectoren(370)
- FFC, FPC (platte flexibele) connectoren(761)
- D-sub, D-vormige connectoren(2887)
- Coaxiale connectoren (RF)(2389)
- Circulaire connectoren(14162)
- Blade -type Power Connectors(273)
- Pluggen en opnames(2597)
- USB, DVI, HDMI Connectors - Adapters(572)
- USB, DVI, HDMI -connectoren(4298)
- Terminals - Wire to Board Connectors(217)
- Terminals - Wire Splice Connectors(4322)
- Terminals - Wire Pin Connectoren(328)
- Terminals - Turret Connectors(1273)
- Terminals - Gespecialiseerde Connectors(2042)
- Terminals - Spade Connectors(3902)
- Terminals - Solder Lug Connectors(345)
- Terminals - Schroefverbindingen(745)
- Terminals - Ring Connectors(12596)
- Terminals - Rechthoekige connectoren(4747)
- Terminals - Quick Connects, Quick Disconnect -connectoren(8514)
- Terminals - PC Pin, Single Post Connectors(3776)
- Terminals - PC Pin Receptacles, Socket Connectors(5883)
- Terminals - Magnetische Wire Connectors(1653)
- Terminals - Mesverbindingen(112)
- Terminals - Kastjes, Laarzen(2850)
- Terminals - Folie Connectors(108)
- Terminals - Barrel, Bullet Connectors(1107)
- Terminals - Adapters(137)
- Terminal Strips en Turret Boards(1159)
- Terminal Junction Systems(2533)
- Terminal Blocks - Wire to Board(43615)
- Terminal Blocks - Gespecialiseerd(3722)
- Terminal Blocks - Power Distribution(847)
- Terminal Blocks - Panel Mount(1359)
- Terminal Blocks - Interface Modules(1819)
- Terminal Blocks - Headers, Plugs and Sockets(119920)
- Terminal Blocks - Din Rail, Channel(9373)
- Terminal Blocks - Contacten(65)
- Terminal Blocks - Barrier Blocks(47517)
- Terminal Blocks - Adapters(1059)
- Solid State Lighting Connectors - Contacten(271)
- Solid State Lighting Connectors(1344)
- Sokjes voor IC's, Transistors - Adapters(275)
- Sockets voor ICS, transistors(22148)
- Shunts, Jumpers(907)
- Rechthoekige connectoren - Load Loaded(7721)
- Rechthoekige connectoren - behuizingen(43023)
- Rechthoekige connectoren - Headers, Special Pin(6129)
- Rechthoekige connectoren - headers, houders, vrouwelijke stopcontacten(229601)
- Rechthoekige connectoren - headers, mannelijke pinnen(543338)
- Rechthoekige connectoren - gratis hangend, paneelbevestiging(30142)
- Rechthoekige connectoren - Contacten(10681)
- Rechthoekige connectoren - bord in, directe draad naar boord (2432)
- Rechthoekige connectoren - Adapters(475)
- Rechthoekig - bord met bord connectoren - headers, houders, vrouwelijke stopcontacten(9)
- Rechthoekig - bord tot board -connectoren - headers, mannelijke pinnen(2)
- Rechthoekige connectoren - bord afstandhouders, stapelaars (bord om aan boord te gaan)(238901)
- Rechthoekige connectoren - arrays, randtype, mezzanine (bord tot bord)(37853)
- Power Entry Connectors - Inlaten, verkooppunten, modules(10310)
- Pluggable connectoren(6049)
- Fotovoltaïsche (zonnepaneel) connectoren - Contacten(77)
- Fotovoltaïsche (zonnepaneel) connectoren(504)
- Modulaire Connectors - Bedradingsblokken(99)
- Modulaire connectoren - stekkers(1674)
- Modulaire Connectors - Plugcabines(181)
- Modulaire Connectors - Jacks With Magnetics(10152)
- Modulaire Connectors - Jacks(23416)
- Modulaire Connectors - Adapters(855)
- Geheugen Connectors - PC Cards - Adapters(21)
- Geheugen Connectors - PC Card Sockets(3299)
- Geheugen Connectors - Inline Module Sockets(3390)
- LGH Connectors(764)
- Keystone - Inserts(2758)
- Keystone - Faceplates, Frames(1926)
- Zware Duty Connectors - Inserts, Modules(4190)
- Zware Duty Connectors - Kastjes, Hoods, Bases(17226)
- Zware Duty Connectors - Frames(523)
- Zware Connectors - Contacten(1832)
- Zware Duty Connectors - Assemblies(671)
- Fiber Optic Connectors - Behuizingen(919)
- Glasvezelconnectoren - Adapters(4455)
- Fiber Optic Connectors(3001)
- FFC, FPC (platte flexibele) connectoren - behuizingen(652)
- FFC, FPC (Flat Flexible) Connectoren - Contacten(202)
- FFC, FPC (platte flexibele) connectoren(18691)
- D-Sub, D-vormige connectoren - Terminators(47)
- D-Sub, D-vormige connectoren - Behuizingen(12238)
- D-Sub, D-vormige connectoren - Contacten(2714)
- D-Sub, D-vormige connectoren - Backshells, Hoods(5995)
- D-Sub, D-vormige connectoren - Adapters(1304)
- D-Sub Connectors(141346)
- D-vormige connectoren - Centronics(8770)
- Contacten, Lente Loaded en Druk(630)
- Contacten - Multi Purpose(6196)
- Contacten - Loodframe(122)
- Coaxiale Connectors (RF) - Terminators(1231)
- Coaxiale connectoren (RF) - Contacten(480)
- Coaxiale connectoren (RF) - Adapters(6386)
- Coaxiale connectoren (RF)(25734)
- Circulaire connectoren - behuizingen(441226)
- Circulaire Connectors - Contacten(4737)
- Circulaire connectoren - Backshells en kabelklemmen(53692)
- Circulaire Connectors - Adapters(8839)
- Circulaire connectoren(1196254)
- Card Edge Connectors - Behuizingen(469)
- Card Edge Connectors - Edgeboard Connectors(672683)
- Card Edge Connectors - Contacten(325)
- Card Edge Connectors - Adapters(73)
- Blade Type Power Connectors - Behuizingen(837)
- Blade Type Power Connectors - Contacten(393)
- Blade -type Power Connectors(4163)
- Tussen Serie Adapters(649)
- Barrel - Power Connectors(935)
- Barrel - Audio Connectors(2432)
- Barrel - Audio Adapters(92)
- Banaan en Tip Connectors - Jacks, Plugs(1644)
- Banaan en Tip Connectors - Bindende Posten(239)
- Banaan en Tip Connectors - Adapters(75)
- Backplane Connectors - Gespecialiseerd(45586)
- Backplane Connectors - Behuizingen(6863)
- Backplane Connectors - Hard Metric, Standard(6297)
- Backplane Connectors - DIN 41612(9408)
- Backplane Connectors - Contacten(3583)
- Backplane Connectors - ARINC Inserts(2357)
- Backplane Connectors - ARINC(3789)
Relevante fabrikant







-
weerstanden
-
condensatoren
condensatoren
- Elektrolytische condensatoren van aluminium(16817)
- Trimmers, variabele condensatoren(3151)
- Dunne film condensatoren(3473)
- Tantalum condensatoren(136103)
- Tantalum - Polymer Condensatoren(9778)
- Silicon Condensatoren(320)
- Niobium Oxide Capacitors(330)
- Mica en PTFE Condensatoren(9101)
- Film condensatoren(150406)
- Elektrische condensatoren met dubbele laag (EDLC), supercondensatoren(2782)
- Keramische condensatoren(833829)
- Capacitor Networks, Arrays(2383)
- Elektrolytische condensatoren van aluminium(125325)
- Aluminium - Polymer Condensatoren(7544)
Relevante fabrikant






-
transformers
-
isolatoren
-
Kristallen, Oscillatoren, Resonatoren
-
schakelaars
schakelaars
- Vergrendelingsschakelaars(2893)
- Noodstop (e-stop) schakelaars(1160)
- Kabeltrekkrachtschakelaars(571)
- Wissel schakelaars(33608)
- Duimwiel schakelaars(742)
- Tactiele schakelaars(14263)
- Snap Action, Limit Switches(28077)
- Schuifschakelaars(5166)
- Selector Switches(9720)
- Rotary Switches(13850)
- Schakelaars(53790)
- Pushbutton Switches - Hall Effect(127)
- Drukknoppen(190826)
- Programmeerbare Display Switches(39)
- Navigatieschakelaars, joystick(1882)
- Magnetische, Reed Switches(1399)
- Toetsenbord schakelaars(637)
- Toetsenblokkers(3684)
- DIP-schakelaars(7747)
- Configurable Switch Components - Lens(1435)
- Configurable Switch Components - Verlichtingsbron(1236)
- Configurable Switch Components - Contactblok(1401)
- Configurable Switch Components - Body(16077)
- Ontkoppel de schakelcomponenten(2567)
Relevante fabrikant






-
relays
relays
- Veiligheidsrelais(1310)
- Reed-relais(1735)
- Hoogfrequente (RF) relais(1190)
- Magneetschakelaars (vaste toestand)(686)
- Magneetschakelaars (Elektromechanisch)(11952)
- Autorelais(1881)
- Solid State Relays(10652)
- Signal relais, tot 2 Amps(9149)
- Relais Sockets(2075)
- Power Relays, meer dan 2 Amps(31604)
- I / O-relaismodules(712)
- I / O Relais Modules - Input(2)
- I / O-relaismodule racks(247)
Relevante fabrikant





























Selecteer Taal
Huidige taal
Nederland
- English
- Deutsch
- Italia
- Français
- 日本語
- 한국의
- русский
- Svenska
- Nederland
- español
- Português
- polski
- Suomi
- Gaeilge
- Slovenská
- Slovenija
- Čeština
- Melayu
- Magyarország
- Hrvatska
- Dansk
- românesc
- Indonesia
- Ελλάδα
- Български език
- Afrikaans
- IsiXhosa
- isiZulu
- lietuvių
- Maori
- Kongeriket
- Монголулс
- O'zbek
- Tiếng Việt
- हिंदी
- اردو
- Kurdî
- Català
- Bosna
- Euskera
- العربية
- فارسی
- Corsa
- Chicheŵa
- עִבְרִית
- Latviešu
- Hausa
- Беларусь
- አማርኛ
- Republika e Shqipërisë
- Eesti Vabariik
- íslenska
- မြန်မာ
- Македонски
- Lëtzebuergesch
- საქართველო
- Cambodia
- Pilipino
- Azərbaycan
- ພາສາລາວ
- বাংলা ভাষার
- پښتو
- malaɡasʲ
- Кыргыз тили
- Ayiti
- Қазақша
- Samoa
- සිංහල
- ภาษาไทย
- Україна
- Kiswahili
- Cрпски
- Galego
- नेपाली
- Sesotho
- Тоҷикӣ
- Türk dili
- ગુજરાતી
- ಕನ್ನಡkannaḍa
- मराठी
Hoe DC-motoren te besturen met de L293D motor driver IC
Tijd: 2026/06/9
Doorbladeren: 173
Het besturen van een motor met een microcontroller is niet zo eenvoudig als het rechtstreeks aansluiten op een uitgangspunt. De meeste microcontrollers kunnen niet voldoende stroom leveren om motoren veilig te bedienen, en pogingen om dit te doen kunnen de schakeling beschadigen. De L293D is een van de meest gebruikte motor driver IC's in deze situatie. In dit artikel leer je wat de L293D is, hoe het intern werkt, de belangrijkste specificaties, pin functies, het Arduino interfacing proces en meer.
Catalogus
L293D Dual H-Bridge Motor Driver IC
De L293D is een dual H-brug motor driver IC ontworpen om low-power microcontrollers en logische schakelingen in staat te stellen om hogere stroom lasten aan te sturen. Het fungeert als een interface tussen de schakeling en de last, waardoor betrouwbare schakeling mogelijk is en het risico van schade aan gevoelige logische componenten wordt verminderd. Het apparaat ondersteunt standaard DTL en TTL logische niveaus, waardoor het compatibel is met veel populaire microcontrollers en embedded systemen.
De IC bevat vier stuurkanalen die kunnen worden geconfigureerd als twee H-bruggen, waardoor onafhankelijke controle van twee DC-motoren of één bipolaire stappenmotor mogelijk is. Het ondersteunt voedingsspanningen voor motoren tot 36 V, continue uitgangsstromen tot 600 mA per kanaal, en schakel frequenties tot 5 kHz. De L293D is beschikbaar in een compact 16-pins pakket en blijft een populaire keuze voor motorbesturing, prototyping en educatieve projecten.
Belangrijkste kenmerken en specificaties
| Categorie |
Parameter |
Specificatie |
| Algemeen |
Apparaat Type |
Quadruple Half-H Driver / Dual H-Bridge Motor Driver IC |
| Logische Compatibiliteit |
DTL en TTL Compatibel |
|
| Aantal Kanalen |
4 Stuur Kanalen |
|
| Aantal H-Bruggen |
2 |
|
| Maximale Schakel Frequentie |
5 kHz |
|
| Kenmerken |
Inschakel Controle |
Ja |
| Oververhitting Bescherming |
Ja |
|
| Interne Klem Diodes |
Ja |
|
| Hoge Geluids Immuniteit |
Logica "0" Ingangsspanning tot 1,5 V |
|
| Elektrisch |
Motor Voedings Spanning (Vs) |
36 V Max |
| Logica Voedings Spanning (Vss) |
36 V Max |
|
| Ingangsspanning (Vi) |
7 V Max |
|
| Inschakel Spanning (Ven) |
7 V Max |
|
| Continue Uitgangsstroom |
600 mA per Kanaal |
|
| Pieksuitgang Stroom (100 μs Niet-Herhalend) |
1,2 A per Kanaal |
|
| Totale Vermogen Dissipatie (Ptot) |
4 W |
|
| Thermisch |
Opslag Temperatuur (Tstg) |
-40°C tot +150°C |
| Junctie Temperatuur (Tj) |
-40°C tot +150°C |
|
| Pakket |
Door-Hole Pakket |
PowerDIP-16 (L293D) |
| Oppervlak-Montage Pakket |
SO-20 (L293DD) |
|
| Pin Count |
16 Pins (PowerDIP) |
|
| Warmteafvoer |
Middelpins Aangesloten voor Warmteafvoer |
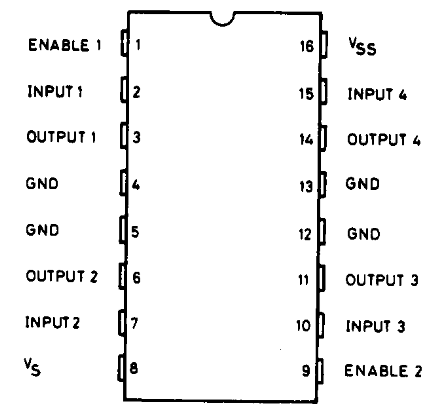
L293D Pinout Details en Functies
| Pin Nr. |
Pin Naam |
Type |
Functie |
| 1 |
Enable 1 (EN1) |
Ingang |
Schakelt Driver 1 en Driver 2 in. Moet HIGH zijn voor Outputs 1 en 2 om te werken. Kan worden gebruikt voor PWM snelheidsregeling. |
| 2 |
Ingang 1 (IN1) |
Ingang |
Logische controle-invoer voor Output 1. Bepaalt de draairichting van de motor bij gebruik met Input 2. |
| 3 |
Output 1 (OUT1) |
Uitgang |
Driveruitgang verbonden met één terminal van de motor of last. |
| 4 |
GND |
Voeding |
Aarde aansluiting voor het apparaat. |
| 5 |
GND |
Voeding |
Aarde aansluiting voor het apparaat. |
| 6 |
Output 2 (OUT2) |
Uitgang |
Driveruitgang verbonden met de andere terminal van de motor of last. |
| 7 |
Ingang 2 (IN2) |
Ingang |
Logische controle-invoer voor Output 2. Werkt met Input 1 voor draairichting controle. |
| 8 |
Vs |
Voeding |
Motor voedingsspanning invoer. Ondersteunt motor voltages tot 36 V. |
| 9 |
Enable 2 (EN2) |
Ingang |
Schakelt Driver 3 en Driver 4 in. Moet HIGH zijn voor Outputs 3 en 4 om te werken. Kan worden gebruikt voor PWM snelheidsregeling. |
| 10 |
Ingang 3 (IN3) |
Ingang |
Logische controle-invoer voor Output 3. Bepaalt de draairichting van de motor bij gebruik met Input 4. |
| 11 |
Output 3 (OUT3) |
Uitgang |
Driveruitgang verbonden met één terminal van de tweede motor of last. |
| 12 |
GND |
Voeding |
Aarde aansluiting voor het apparaat. |
| 13 |
GND |
Voeding |
Aarde aansluiting voor het apparaat. |
| 14 |
Output 4 (OUT4) |
Uitgang |
Driveruitgang verbonden met de andere terminal van de tweede motor of last. |
| 15 |
Ingang 4 (IN4) |
Ingang |
Logische controle-invoer voor Output 4. Werkt met Input 3 voor draairichting controle. |
| 16 |
Vss |
Voeding |
Logische voedingsspanning invoer (typisch 5 V) voor de interne besturingscircuits. |
L293D Functioneel Blokdiagram
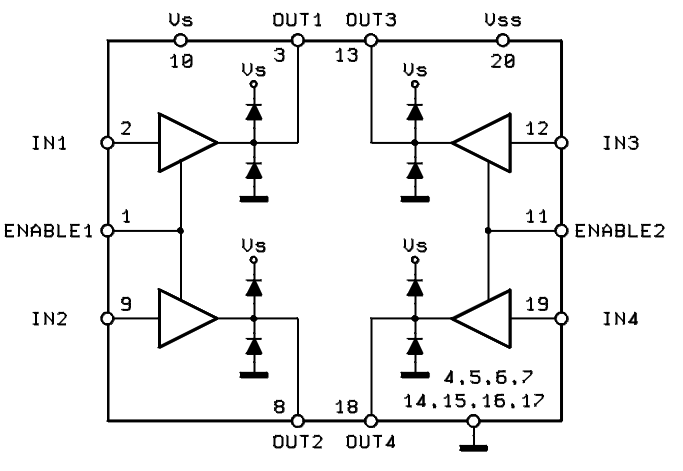
Het functionele blokdiagram toont hoe controle signalen door de L293D reizen om een aangesloten last te bedienen. Wanneer een logisch signaal op een van de ingangs-pinnen wordt toegepast, komt het binnen in de interne besturingscircuits, die het signaal verwerken en de toestand van de bijbehorende uitgaande driver bepalen. De uitgangsfase gebruikt vervolgens de motor voedingsspanning om de vereiste stroom naar de aan-uit pinnen te leveren.
Het diagram illustreert ook hoe elk paar ingangen en uitgangen een H-brug driver vormt. Door de logische toestanden van de ingangen te veranderen, kan de stroom door de last in verschillende richtingen vloeien, waardoor vooruit en achteruit motorrotatie mogelijk is. De inschakelpinnen fungeren als controlepoorten voor elk H-brug gedeelte en kunnen worden gebruikt om de uitgangen in of uit te schakelen of PWM-signalen toe te passen voor snelheidsregeling. Deze signaalstroom van invoer naar uitvoer stelt de L293D in staat om gecontroleerde bidirectionele schakeling te bieden voor motor-aandrijvings toepassingen.
L293D Arduino Interface Proces
Het basisbekabelingsschema toont een Arduino Uno verbonden met een L293D motor driver IC, die wordt gebruikt om twee DC-motoren te bedienen. De Arduino levert de logische controle signalen, terwijl een aparte 5 V voeding de stroom levert die door de motoren vereist is. De L293D fungeert als een interface tussen de laagspanning Arduino-pinnen en de hogere stroom motor-lasten. Ingangspinnen op de L293D ontvangen controlesignalen van de Arduino, terwijl de uitgangspinnen direct met de motoren zijn verbonden. Zowel de Arduino als de externe voeding moeten een gemeenschappelijke aarde delen om een goede werking te garanderen.
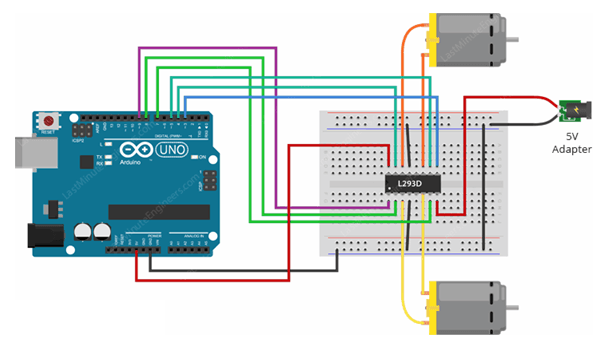
Motorsnelheid kan worden gecontroleerd met behulp van Pulsbreedtemodulatie (PWM). In deze methode stuurt de Arduino een PWM-signaal naar een van de L293D inschakelpinnen. Door de PWM-dutycyclus te veranderen, verandert de gemiddelde spanning die op de motor wordt toegepast, waardoor een soepele snelheidsaanpassing mogelijk is zonder de voedingsspanning te wijzigen.
De draairichting van de motor wordt geregeld via de ingangs-pinnen. Bijvoorbeeld, het instellen van IN1 HIGH en IN2 LOW zorgt ervoor dat de motor in één richting draait, terwijl het omdraaien van de logische niveaus ervoor zorgt dat de motor in de tegenovergestelde richting draait. Het toepassen van hetzelfde logische niveau op beide ingangen kan de motor stoppen of remmen, afhankelijk van de schakeling configuratie.
Een van de meest voorkomende programmeerfouten is het vergeten om de enable pin als een uitgang te configureren of deze op LOW te laten, wat het motorrun verhindert. Onjuiste pin toewijzingen in de code kunnen ook zorgen voor onverwacht gedrag van de motor. Een ander veelvoorkomend probleem is het niet delen van een gemeenschappelijke grond tussen de Arduino en de voeding van de motor, wat resulteert in onstabiele werking of helemaal geen motorrespons.
L293D vs Andere Motor Driver IC's
| Specificatie |
L293D |
L298N |
TB6612FNG |
DRV8833 |
BTS7960 |
| Stuurprogramma Type |
Dual H-Bridge |
Dual H-Bridge |
Dual H-Bridge |
Dual H-Bridge |
Volledige H-Bridge |
| Motor Voeding Spanning |
4.5 V tot 36 V |
5 V tot 46 V |
4.5 V tot 13.5 V |
2.7 V tot 10.8 V |
5.5 V tot 27 V |
| Logica Spanning |
4.5 V tot 7 V |
5 V |
2.7 V tot 5.5 V |
2 V tot 7 V |
3.3 V tot 5 V |
| Continue Uitgangsstroom |
600 mA/kanaal |
2 A/kanaal |
1.2 A/kanaal |
1.5 A/kanaal |
43 A |
| Piekuitsrroom |
1.2 A/kanaal |
3 A/kanaal |
3.2 A/kanaal |
2 A/kanaal |
55 A |
| Interne Protectie Diodes |
Ja |
Nee |
Ja |
Ja |
Ja |
| Thermische Bescherming |
Ja |
Ja |
Ja |
Ja |
Ja |
| PWM Ondersteuning |
Ja |
Ja |
Ja |
Ja |
Ja |
| Output Technologie |
Bipolaire Transistors |
Bipolaire Transistors |
MOSFET |
MOSFET |
MOSFET |
| Efficiëntie |
Laag |
Laag |
Hoog |
Hoog |
Zeer Hoog |
| Spanning Drop |
Hoog (≈1.2–1.8 V per zijde) |
Hoog (≈2–4 V totaal) |
Laag (<0.5 V typical) |
Laag (<0.4 V typical) |
Zeer Laag |
| Warmte Generatie |
Hoog |
Hoog |
Laag |
Laag |
Laag |
| Externe Heatsink Vereist |
Gewoonlijk Niet |
Vaak Vereist |
Zelden Vereist |
Zelden Vereist |
Vereist bij Hoge Stroom |
| Aantal DC-motoren |
2 |
2 |
2 |
2 |
1 Hoge Vermogen Motor |
| Beste Voor |
Kleine DC-motoren, Onderwijsprojecten |
Middelgrote Motoren |
Robots, Batterijapparaten |
Compacte Draagbare Ontwerpen |
Hoge Vermogen Motoren en Robotica |
Typische Toepassingen en Gebruikscases
Educatieve en Arduino Projecten
De L293D wordt veel gebruikt in educatieve projecten en Arduino-gebaseerde leerplatforms. De eenvoudige interface stelt beginners in staat om DC-motoren te besturen en basisconcepten zoals motorrichting, PWM-snelheidsregeling en H-bridge werking te leren zonder complexe schakelingen.
Kleine Mobiele Robots
Veel kleine robotvoertuigen gebruiken de L293D om twee DC-motoren onafhankelijk aan te drijven. Dit stelt de robot in staat om vooruit, achteruit, linksom en rechtsom te bewegen door de richting en snelheid van elke motor afzonderlijk te regelen.
Stappenmotorbesturing
De dual H-bridge architectuur van de L293D kan worden gebruikt om bipolaire stappenmotoren te besturen. Door de motorwikkelingen in een specifieke volgorde van spanning te voorzien, maakt de driver nauwkeurige stap-voor-stap beweging mogelijk voor positioneringsapplicaties.
Relay en Solenoïde Aansturing
De L293D kan relais en solenoïden aansteken die meer stroom vereisen dan een microcontroller outputpin kan leveren. De ingebouwde beschermdiodes helpen bij het onderdrukken van spanningspieken die ontstaan wanneer deze inductieve lasten worden schakelen.
Geautomatiseerde Besturingssystemen
In eenvoudige automatiseringssystemen wordt de L293D gebruikt om kleine actuators, kleppen en mechanische apparaten te besturen. De driver biedt een gemakkelijke manier om logische schakelingen met electromechanische belastingen te verbinden.
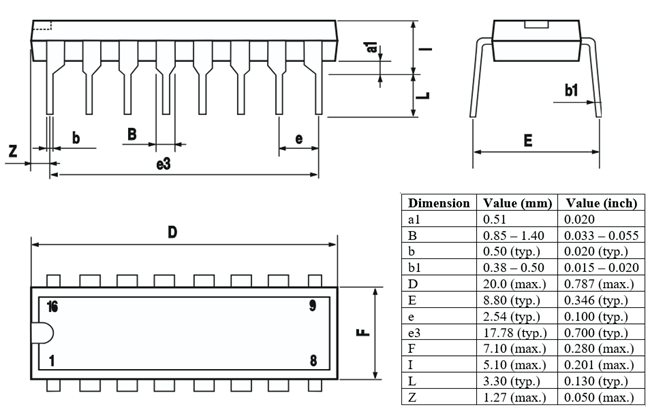
Mechanische Afmetingen
Fabrikant
STMicroelectronics is een van de toonaangevende fabrikanten van halfgeleiders ter wereld, met tientallen jaren ervaring in het ontwerpen en produceren van analoge, stroombeheer-, motorbesturings- en gemengde signaal geïntegreerde circuits. Voor producten zoals de L293D motorstuur IC, gebruikt STMicroelectronics volwassen halfgeleiderfabricageprocessen om een consistente elektrische prestaties, betrouwbaarheid, thermische stabiliteit en langdurige productbeschikbaarheid te waarborgen. De productiecapaciteiten worden ondersteund door uitgebreide onderzoek- en ontwikkelingsbronnen, geautomatiseerde productiesystemen en naleving van internationale kwaliteits- en milieu standaarden.
Veelgestelde Vragen [FAQ]
1. Waarom heeft de L293D aparte logica- en motorvoedingspinnen?
De L293D gebruikt aparte stroomvoorzieningen zodat de logische schakeling en de motorschakeling op verschillende voltages kunnen werken. Dit stelt een microcontroller met een laag voltage in staat om een motor met een hoger voltage te besturen zonder de besturingscircuits bloot te stellen aan de voedingsspanning van de motor.
2. Hoe beschermt de L293D zichzelf tegen spanningspieken veroorzaakt door motoren?
De L293D bevat interne klemdiodes die de teruggaande spanning absorberen die ontstaat wanneer een inductieve belasting wordt uitgeschakeld. Deze diodes helpen schade aan de driver te voorkomen en verbeteren de algehele betrouwbaarheid van de schakeling.
3. Waarom draait een door de L293D aangedreven motor vaak langzamer dan verwacht?
De L293D gebruikt bipolaire transistoruitgangsfases die een spanningsval creëren tussen de voeding en de motor. Als gevolg hiervan ontvangt de motor minder voltage dan de voedingsbron levert, wat de snelheid en het koppel kan verminderen.
4. Kan de L293D twee motoren onafhankelijk op verschillende snelheden aansturen?
Ja. Elke H-brugsectie kan afzonderlijk worden aangestuurd. Door verschillende PWM-signalen op de inschakelpinnen toe te passen, kan elke motor op zijn eigen snelheid en richting werken.
5. Wat gebeurt er als de inschakelpinna is losgekoppeld?
De overeenkomstige uitgangen kunnen uitgeschakeld blijven of onvoorspelbaar werken. De inschakelpinna moet worden aangesloten op een gedefinieerd HIGH- of PWM-signaal om een goede motorbesturing te garanderen.
6. Waarom is een gemeenschappelijke aarde vereist tussen de Arduino en de L293D voeding?
Een gemeenschappelijke aarde biedt een gedeelde spanningsreferentie tussen de besturingscircuits en de motordriver. Zonder dit kunnen de logicasignalen niet correct worden geïnterpreteerd, wat resulteert in onbetrouwbare werking.
7. Wanneer moet je kiezen voor een moderne motorstuurder in plaats van de L293D?
Voor op batterijen gevoede apparaten, hoge-stroommotoren of toepassingen die maximale efficiëntie vereisen, zijn moderne op MOSFET gebaseerde stuurprogramma's zoals de TB6612FNG of DRV8833 vaak betere keuzes omdat ze minder warmte genereren en minder vermogen verspillen.
Gerelateerd artikel
-
![Stap-voor-stap geïntegreerde schakeling productieproces]() Jun 09 2026
Jun 09 2026 -
![Ingangs- en uitgangsimpedantie in operationele versterkers]() Jun 09 2026
Jun 09 2026
gerelateerde -producten

GRM21BR61A226ME51L
CAP CER 22UF 10V X5R 0805

CS0603KRX7R9BB102
CAP CER 1000PF 50V X7R 0603
12102C392KAT2A
CAP CER 3900PF 200V X7R 1210

TLC556CDRG4
IC OSC TIMER DUAL 2.1MHZ 14-SOIC
XC6SLX45-3FG484I
IC FPGA 316 I/O 484FBGA

ADG1436YRUZ
IC SWITCH SPDTX2 1.8OHM 16TSSOP

TUSB7340IRKMT
IC HUB CONTROLLER USB 100WQFN

TM4C1230C3PMIR
IC MCU 32BIT 32KB FLASH 64LQFP

HIP4081AIBZ
IC HALF/FULL BRIDGE DRVR 20SOIC

GS70328TS-12
GS70328TS-12 GSI
CS16312EN
CS16312EN SEMIC

R7F0C004M2DFB-C
RENESAS LQFP80

DS1245AB-120IND
IC NVSRAM 1MBIT PARALLEL 32EDIP